
Vamos para a parte 3 de nosso barndoor tracker. Depois de tanto bla bla bla, chega a hora de construirmos a parte eletrônica. Você vai precisar de:
- Um arduino NANO(ou UNO ou mini, dependendo do seu gosto)
- Um driver controlador L293D (que geralmente não acompanha o motor)
- Uma fonte de 9 volts
- Uma placa para montagem genérica – ou faça sua própria placa de circuito impresso se souber (e tiver saco)
Eu usei uma fonte de 9 volts comum comprada em um site da internet que custa uma merreca, mas você pode usar um conjunto de pilhas (ou bateria) que forneça os mesmos 9 volts.
O primeiro passo é fazer uma pequena modificação no seu motor de passo como descrita nesse post aqui. Como você não vai ler, eu resumo – nosso pequeno 28BYJ-48 é muito fraquinho, ele consegue mover nosso peso todo do conjunto, mas vai sofrer um pouco caso as engrenagens rodem sem folga, o que com certeza vai acontecer pois quando você entortar a barra roscada, nem por milagre você vai conseguir deixar perfeito. Para evitar esse problema (ou minimizá-lo, na verdade) nós vamos fazer uma modificação transformando nosso motor de bipolar para unipolar e aumentar seu torque dos originais 300gcm para 800gcm, ou seja, nosso motor vai ficar mais fortinho. Provavelmente ele dure menos também pois passará a usar 9volts do driver, mas nada é perfeito, afinal de contas.
Tudo que você deve fazer é abrir o pequeno motor e com ajuda de um estilete fazer um pequeno corte para inutilizar a trilha da placa que liga os pinos do meio. Veja essa foto aqui para entender :
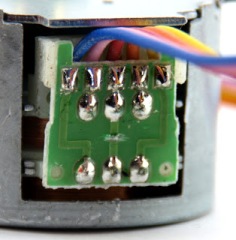
Só esse pequeno corte ai, junto com o driver L293D já vai ser suficiente para dar uma aumentada na força do nosso motorzinho. Não é grande coisa, mas já ajuda.
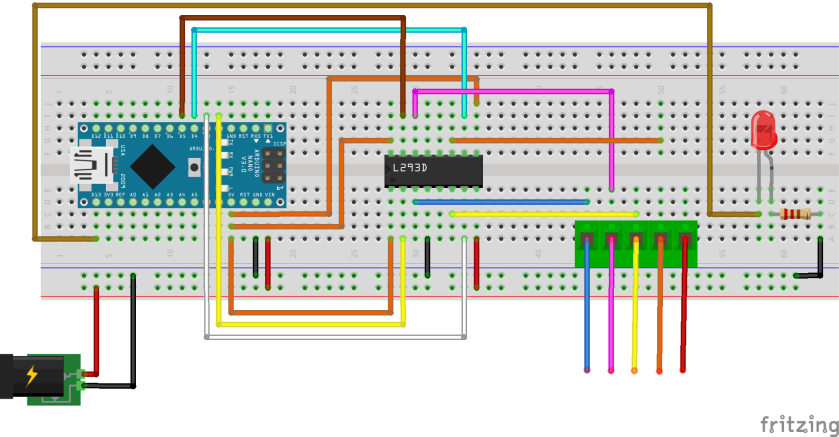
O esquema da parte eletrônica é muito fácil, e eu preferi usar o arduino nano para ficar mais limpo (eu nunca uso arduino UNO nas minhas montagens). Além das conexões com o driver do motor, eu coloquei também um led externo para que, mesmo dormindo, eu tenho facilidade de ver se o conjunto está ligado.
Veja abaixo o esquema de ligação feito no fritzing
O código do sketch usa a biblioteca customstepper, então não esqueça de incluí-la no seu IDE. Analisando o código você vai ver que a parte teórica é mais importante nesse projeto. Todas as nossas contas da primeira parte estão lá.
Lembre que aquele conector verde nada mais é que o próprio conector do motor. Como eu disse antes, esqueça o driver original do motor, ele agora não vai servir.
// Barndoor tracker 2016
// Autor: fg1998
// fg1998@gmail.com
#include <CustomStepper.h>
#define IN1 2
#define IN2 3
#define IN3 4
#define IN4 5
#define LED 13
CustomStepper stepper(IN1, IN3, IN2, IN4);
void setup()
{
Serial.begin(9600);
pinMode(LED, OUTPUT);
digitalWrite(LED, HIGH);
// RPM do motor - veja os cálculos na página
stepper.setRPM(3.6625);
//Passos por rotação do motor 28byj-48 (via Datasheet)
stepper.setSPR(4075.7728395);
stepper.setDirection(CW);
// Rotação do motor
stepper.rotate(0);
}
void loop()
{
stepper.run();
}
Monte da melhor forma que puder e mande bala. No próximo post vamos mostrar o resultado disso tudo e mais um macetinho para aliviar ainda mais nosso pequeno motorzinho.
Abraços e céus limpos

Qual é o link que vc mostra o resultado e o “macetinho’?
Tá no texto. Segue aqui também
http://www.jangeox.be/2013/10/change-unipolar-28byj-48-to-bipolar.html?m=1